
- wheels and tires of the prescribed and identical size are installed;
- the tread pattern height is normal and differs between wheels on the same axle by no more than 2 mm;
- tire inflation pressure is normal;
- steering play within tolerance;
- the condition of the suspension and shock absorbers is normal;
- the vehicle is in a running condition: full fuel tank, full washer fluid reservoir, spare wheel and on-board tool in the regular place, without a driver.
2. Checking the wheel alignment angles is required when uneven tire wear is detected, after an accident, after removing some steering suspension components. For the front suspension, these components include the wheel bearing carrier, steering rod, steering gear, and subframe. For the rear suspension, these components include the transverse rod, guide rod, hub carrier, trapezoidal rod, and subframe. In addition, the listed front suspension components require adjustment of the toe-in value "S".
3. To establish correct toe-in, it is necessary to perform wheel runout compensation.
4. Before adjusting the wheel alignment angles, depress the brake pedal and lock it in this position.
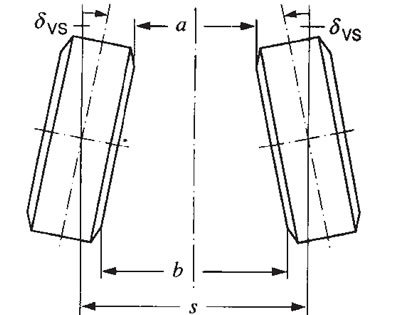
23.4. Front wheel toe-in δvs - Wheel alignment angle; a - Distance between the front edges of the wheels; b - Distance between rear edges of wheels; s - Track; b-a. Convergence
5. The sequence of actions should be as follows. First, it is necessary to check/adjust the camber of the front and rear wheels. Then the toe-in of the rear wheels, the toe-in curve of the front wheels and the toe-in of the front wheels. If adjustment has been made, then it is necessary to set the zero position for the steering wheel angle sensor (using the VAS5051A diagnostic scanner).
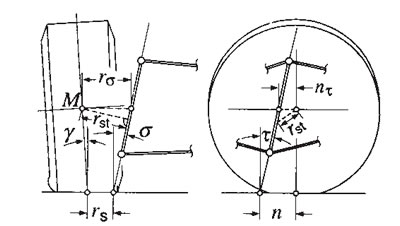
23.5. Wheel alignment angles M - Wheel Assembly Center; rst Kinematic length of the journal; nτ - Longitudinal displacement of the wheel pivot axis; n - Positive stabilization arm; τ - Angle of longitudinal inclination of the wheel rotation axis; rδ - Lateral displacement of the wheel pivot axis; rs - Rolling shoulder; γ - Camber angle; δ - Angle of transverse inclination of the wheel pivot axis